




 English
English 中文
中文 Italian
Italian Türkçe
Türkçe Português
Português Deutsch
Deutsch العربية
العربية Tiếng Việt
Tiếng Việt Français
Français Русский
Русский



Sra. Lizzy
Hola, soy Lizzy de DINOSAW (no soy un robot). ¿Qué máquina (modelo) deseas? Por favor contáctanos por WhatsApp ahora
Horario de atención:8:30am-20:30pm
WhatsApp: +86 198-5901-3937
 Sep 19, 2025LECTURA DE 5 MIN
Sep 19, 2025LECTURA DE 5 MIN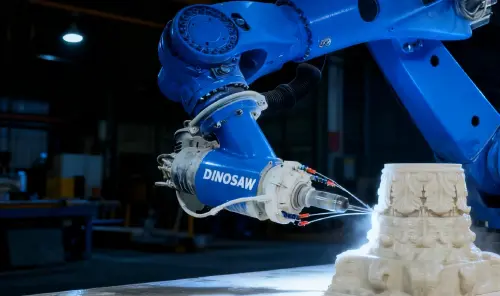 Sep 19, 2025LECTURA DE 5 MIN
Sep 19, 2025LECTURA DE 5 MINDesglose técnico de la celda robótica de tallado en piedra DINOSAW de 7 ejes. Explora su arquitectura, componentes principales, parámetros operativos y mitigación de fallos para granito, mármol y caliza. Logra una repetibilidad de ±0,06 mm.
El tallado de piedra en granito, mármol y caliza lleva los límites mecánicos al máximo: precisión, rigidez y control de polvo/lodo. Una celda robótica de tallado en piedra de 7 ejes (robot de 6 ejes + mesa giratoria + husillo refrigerado por agua) ofrece repetibilidad (±0,06 mm, según el fabricante), operaciones más seguras y tiempos de ciclo predecibles.
Consulta la talla robótica de piedra DINOSAW para ver la arquitectura de referencia impulsada por herramientas diamantadas.
¿Necesitas adaptar estas especificaciones técnicas a tu área de producción? Nuestros ingenieros pueden proporcionarte un plan de integración detallado.
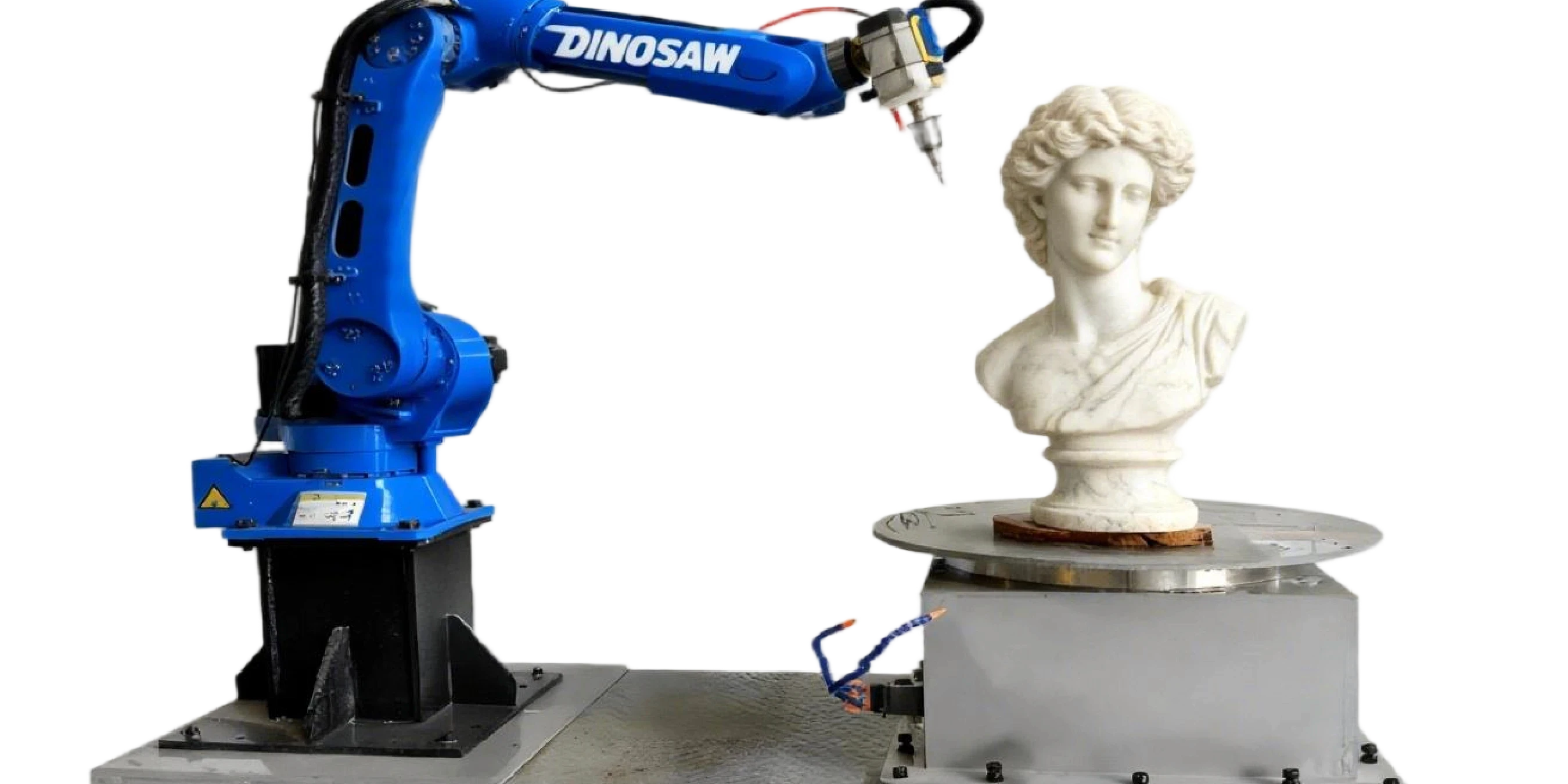
El rendimiento de la celda se basa en la interacción fluida de cuatro pilares: mecánica, controles, software y seguridad. El flujo de trabajo típico comienza con un escaneo 3D o modelo CAD, que se importa al software CAM para generar una trayectoria de herramienta multieje. Este programa se envía al controlador del robot, que ejecuta los movimientos complejos y sincronizados necesarios para el tallado.
Cada componente dentro de la celda robótica de piedra tiene un rango operativo definido. Comprender estos parámetros—desde el husillo refrigerado por agua para el sistema de tallado hasta la herramienta diamantada DINOSAW específica—es crucial para la optimización del proceso y la resolución de problemas.
| Componente | Parámetros Clave y Rangos Típicos |
|---|---|
| Husillo Refrigerado por Agua | Velocidad: 6.000–24.000 RPM; Par: Nm en varios RPM; Flujo de refrigerante: 5–15 L/min (1,3–4,0 gpm) |
| Herramientas Diamantadas DINOSAW | Diámetros de mango: 6 mm, 8 mm, 12 mm; Familias de herramientas: fresas esféricas/planas, fresas cónicas para grabado, fresas en V, fresas de desbaste. |
| Mesa Giratoria (7º Eje) | Diámetro: adaptado al tamaño máximo del bloque (confirmar durante el diseño del utillaje), mm/pulg; Carga máxima: capacidad seleccionada para tu bloque más pesado (confirmar durante el diseño mecánico), kg. |
| Sistema de Visión/Escaneo | Resolución: la resolución del escáner varía según el modelo (confirmar con el proveedor), distancia entre puntos en mm. |
El mantenimiento proactivo y la comprensión de los modos de fallo son esenciales para maximizar el tiempo de actividad en un entorno de tallado de piedra de alto desgaste.

Una celda robótica no opera de forma aislada. Su capacidad para comunicarse con otros sistemas de fábrica y aceptar formatos de datos estándar es clave para su utilidad.
Las siguientes tablas ofrecen puntos de partida conservadores para tallar diferentes tipos de piedra. Deben ajustarse según la máquina, herramienta y lote de material específico.
| Proceso | Herramienta | Velocidad del Husillo (RPM) | Avance (mm/min) | Paso Lateral |
|---|---|---|---|---|
| Desbaste | Fresa esférica DINOSAW | 8.000–12.000 | 1.000–2.000 | 40-50% del diámetro de la herramienta |
| Acabado/Letras | Fresa en V DINOSAW | 15.000–20.000 | 500–1.000 | N/A |
| Proceso | Herramienta | Velocidad del Husillo (RPM) | Avance (mm/min) | Paso Lateral |
|---|---|---|---|---|
| Desbaste | Fresa esférica DINOSAW | 10.000–15.000 | 1.500–3.000 | 50-60% del diámetro de la herramienta |
| Acabado | Fresa cónica DINOSAW | 18.000–24.000 | 800–1.500 | 5-10% del diámetro de la herramienta |
| Proceso | Herramienta | Velocidad del Husillo (RPM) | Avance (mm/min) | Paso Lateral |
|---|---|---|---|---|
| Desbaste | Fresa esférica DINOSAW | 12.000–18.000 | 2.500–4.000 | 50-70% del diámetro de la herramienta |
| Acabado | Fresa cónica DINOSAW | 20.000–24.000 | 1.200–2.000 | 10-15% del diámetro de la herramienta |
La celda de tallado de 7 ejes DINOSAW es un ecosistema diseñado para la precisión y durabilidad en la fabricación de piedra. Su arquitectura—desde el husillo refrigerado por agua y las herramientas diamantadas DINOSAW hasta el robusto sistema de control—mitiga directamente fallos comunes como el rechinamiento por vibración y la deriva térmica. Para ingenieros y equipos de mantenimiento, esto se traduce en mayor tiempo de actividad, calidad constante y un entorno de trabajo más seguro. El siguiente paso es adaptar estas capacidades técnicas a tus necesidades operativas específicas.
Una carga útil seleccionada para tu bloque más pesado (confirmar durante el diseño mecánico), kg y un alcance adaptado al mayor volumen de pieza (confirmar durante el diseño de layout), mm/pulg son puntos de partida típicos. Esto debe considerar el peso del husillo, el cambiador de herramientas y la propia herramienta. La mesa giratoria tendrá dimensiones de diámetro adaptado al tamaño máximo del bloque (confirmar durante el diseño del utillaje), mm/pulg.
Planifica un diámetro de mesa adaptado al tamaño máximo del bloque (confirmar durante el diseño del utillaje), mm/pulg con una capacidad máxima seleccionada para tu bloque más pesado (confirmar durante el diseño mecánico), kg. La precisión de indexado suele especificarse en segundos de arco (confirmar con el proveedor). Asegura suficiente espacio alrededor de la mesa para el rango completo de movimiento del robot.
Gestiona la temperatura del husillo según las indicaciones del fabricante (refrigeración y control de temperatura). Considera un ciclo de calentamiento y programa los pasajes críticos de acabado tras la estabilización térmica.
El sistema normalmente soporta protocolos industriales como Profinet u OPC UA para integración. Confirma las necesidades de protocolo específicas durante la fase de diseño. Esto permite el mapeo de E/S para periféricos (utillajes, sensores) e integración en un circuito central de seguridad.
Las prácticas habituales de seguridad incluyen un circuito de parada de emergencia y puertas de acceso enclavadas, complementados por protección de recintos (por ejemplo, IP65) y monitorización del estado del husillo. Consulta la normativa local para dispositivos requeridos y frecuencia de pruebas.
Los métodos comunes incluyen monitorizar tendencias de carga del husillo para detectar aumentos, usar contadores de vida útil de herramienta basados en software para activar el cambio, o integrar un medidor láser para medir automáticamente las dimensiones de la herramienta entre ciclos.
Sí. El software de Programación Offline (OLP) (por ejemplo, SprutCAM) es esencial para maximizar el tiempo de actividad, ya que permite programar mientras la máquina está en funcionamiento. También es fundamental para simular movimientos complejos de 7 ejes y evitar colisiones, así como para convertir datos de escaneo 3D en trayectorias ejecutables.
 Español
Español
Obtén una solución sencilla
Chat en línea
Hola, soy Lizzy de DINOSAW (no soy un robot). ¿Qué máquina (modelo) deseas? Por favor contáctanos por WhatsApp ahora
Hola 👋 ¿Cómo podemos ayudarte?