




 English
English 中文
中文 Italian
Italian Türkçe
Türkçe Português
Português Español
Español Deutsch
Deutsch العربية
العربية Tiếng Việt
Tiếng Việt Русский
Русский



Mme Lizzy
Bonjour, ici Lizzy de DINOSAW (pas un robot). Quelle machine (modèle) souhaitez-vous ? Veuillez nous contacter sur WhatsApp maintenant
Heures d'ouverture:8:30am-20:30pm
WhatsApp: +86 198-5901-3937
 Sep 19, 20255 MIN DE LECTURE
Sep 19, 20255 MIN DE LECTURE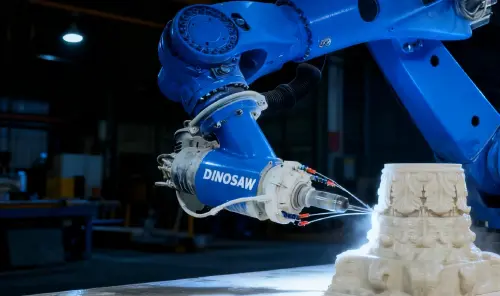 Sep 19, 20255 MIN DE LECTURE
Sep 19, 20255 MIN DE LECTUREAnalyse technique de la cellule robotique de sculpture sur pierre DINOSAW à 7 axes. Explorez son architecture, ses composants clés, ses paramètres de fonctionnement et la gestion des défaillances pour le granit, le marbre et le calcaire. Atteint une répétabilité de ±0,06 mm.
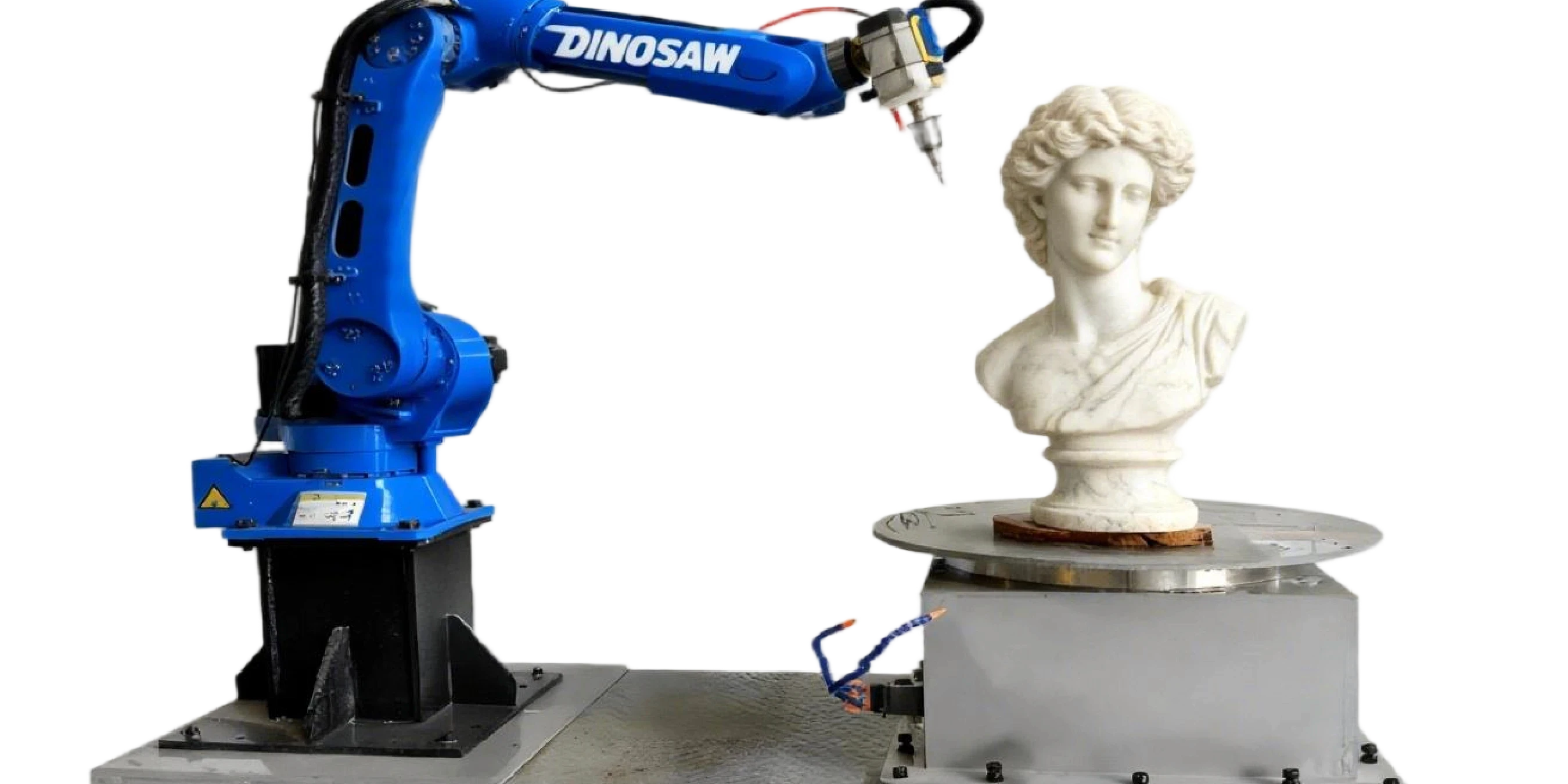
La sculpture sur pierre dans le granit, le marbre et le calcaire repousse les limites mécaniques — précision, rigidité et gestion de la poussière/boue. Une cellule robotique de sculpture sur pierre à 7 axes (robot 6 axes + table rotative + broche refroidie par eau) offre une répétabilité (±0,06 mm, selon le fabricant), des opérations plus sûres et des temps de cycle prévisibles.
Voir la sculpture robotisée sur pierre DINOSAW pour l'architecture de référence propulsée par des outils diamantés.
Vous souhaitez adapter ces spécifications techniques à votre atelier ? Nos ingénieurs peuvent vous fournir un plan d'intégration détaillé.
Les performances de la cellule reposent sur l'interaction harmonieuse de quatre piliers : la mécanique, les commandes, les logiciels et la sécurité. Un flux de travail typique commence par un scan 3D ou un modèle CAO, importé dans le logiciel de FAO pour générer une trajectoire d'outil multi-axes. Ce programme est ensuite envoyé au contrôleur du robot, qui exécute les mouvements complexes et synchronisés nécessaires à la sculpture.
Chaque composant de la cellule robotisée pour la pierre dispose d'une plage de fonctionnement définie. Comprendre ces paramètres — de la broche refroidie par eau du système de sculpture aux outils diamantés DINOSAW spécifiques — est essentiel pour optimiser le procédé et résoudre les problèmes.
| Composant | Paramètres clés & plages typiques |
|---|---|
| Broche refroidie par eau | Vitesse : 6 000–24 000 tr/min ; Couple : Nm à différents régimes ; Débit de liquide de refroidissement : 5–15 L/min (1,3–4,0 gpm) |
| Outils diamantés DINOSAW | Diamètres de queue : 6 mm, 8 mm, 12 mm ; Familles d'outils : fraises boule/plates, fraises coniques de gravure, fraises en V, fraises rotatives. |
| Table rotative (7e axe) | Diamètre : adapté à la taille maximale du bloc (à confirmer lors de la conception du bridage), mm/pouces ; Charge max : capacité sélectionnée selon votre bloc le plus lourd (à confirmer lors de la conception mécanique), kg. |
| Système de vision/scan | Résolution : résolution du scanner variable selon le modèle (à confirmer avec le fournisseur), espacement des points en mm. |
La maintenance proactive et la compréhension des modes de défaillance sont essentielles pour maximiser la disponibilité dans un environnement de sculpture sur pierre à forte usure.

Une cellule robotisée ne fonctionne pas en vase clos. Sa capacité à communiquer avec d'autres systèmes de l'usine et à accepter des formats de données standards est essentielle à son utilité.
Les tableaux suivants fournissent des points de départ prudents pour la sculpture de différents types de pierre. Ils doivent être affinés selon la machine, l'outil et le lot de matériau spécifiques.
| Procédé | Outil | Vitesse broche (tr/min) | Avance (mm/min) | Recouvrement |
|---|---|---|---|---|
| Dégrossissage | Fraise boule DINOSAW | 8 000–12 000 | 1 000–2 000 | 40-50% du diamètre de l'outil |
| Finition/Lettrage | Fraise en V DINOSAW | 15 000–20 000 | 500–1 000 | N/A |
| Procédé | Outil | Vitesse broche (tr/min) | Avance (mm/min) | Recouvrement |
|---|---|---|---|---|
| Dégrossissage | Fraise boule DINOSAW | 10 000–15 000 | 1 500–3 000 | 50-60% du diamètre de l'outil |
| Finition | Fraise conique DINOSAW | 18 000–24 000 | 800–1 500 | 5-10% du diamètre de l'outil |
| Procédé | Outil | Vitesse broche (tr/min) | Avance (mm/min) | Recouvrement |
|---|---|---|---|---|
| Dégrossissage | Fraise boule DINOSAW | 12 000–18 000 | 2 500–4 000 | 50-70% du diamètre de l'outil |
| Finition | Fraise conique DINOSAW | 20 000–24 000 | 1 200–2 000 | 10-15% du diamètre de l'outil |
La cellule de sculpture à 7 axes DINOSAW est un écosystème conçu pour la précision et la durabilité dans la transformation de la pierre. Son architecture — de la broche refroidie par eau aux outils diamantés DINOSAW en passant par le système de contrôle robuste — permet de limiter directement les défaillances courantes comme le broutement et la dérive thermique. Pour les ingénieurs et équipes de maintenance, cela se traduit par une disponibilité accrue, une qualité constante et un environnement de travail plus sûr. L'étape suivante consiste à adapter ces capacités techniques à vos besoins opérationnels spécifiques.
Une charge utile sélectionnée selon votre bloc le plus lourd (à confirmer lors de la conception mécanique), kg, et une portée adaptée à votre plus grande pièce (à confirmer lors de l'implantation), mm/pouces, constituent des points de départ typiques. Il faut tenir compte du poids de la broche, du changeur d'outil et de l'outil lui-même. La table rotative aura des dimensions adaptées à la taille maximale du bloc (à confirmer lors de la conception du bridage), mm/pouces.
Prévoyez un diamètre de table adapté à la taille maximale du bloc (à confirmer lors de la conception du bridage), mm/pouces, avec une capacité de charge maximale sélectionnée selon votre bloc le plus lourd (à confirmer lors de la conception mécanique), kg. La précision d'indexation est généralement spécifiée en secondes d'arc (à confirmer avec le fournisseur). Veillez à laisser suffisamment d'espace autour de la table pour la course complète du robot.
Gérez la température de la broche selon les recommandations du fabricant (refroidissement et contrôle de température). Prévoyez un cycle de préchauffage et programmez les passes de finition critiques après stabilisation thermique.
Le système prend généralement en charge les protocoles industriels tels que Profinet ou OPC UA pour l'intégration. Confirmez les besoins spécifiques en protocole lors de la phase de conception. Cela permet la cartographie des E/S pour les périphériques (bridages, capteurs) et l'intégration dans un circuit de sécurité centralisé.
Les pratiques courantes incluent un circuit d'arrêt d'urgence et des portes d'accès verrouillées, complétés par une protection du carter (ex. IP65) et la surveillance de l'état de la broche. Consultez les normes locales pour les dispositifs requis et la fréquence des tests.
Les méthodes courantes incluent la surveillance des tendances de charge de la broche, l'utilisation de compteurs logiciels de durée de vie de l'outil pour déclencher un changement, ou l'intégration d'un palpeur laser pour mesurer automatiquement les dimensions de l'outil entre les cycles.
Oui. Un logiciel de Programmation Hors-Ligne (OLP) (ex. SprutCAM) est essentiel pour maximiser la disponibilité, car il permet de programmer pendant que la machine fonctionne. Il est également crucial pour simuler des mouvements complexes à 7 axes afin d'éviter les collisions et de convertir les données de scan 3D en trajectoires exécutables.
 Français
Français
Obtenez une solution facile
Discussion en ligne
Bonjour, ici Lizzy de DINOSAW (pas un robot). Quelle machine (modèle) souhaitez-vous ? Veuillez nous contacter sur WhatsApp maintenant
Bonjour 👋 Comment pouvons-nous vous aider ?